|
Hayabusa Landed on and Took
Off from Itokawa successfully
Detailed Analysis
Revealed
Hayabusa attempted its
first soft-landing on Itokawa for the purpose of touch
down and sample collection on November 20-21, 2005.
Below is the data information with the related advance
report on its status.
Hayabusa started descending
at 9:00pm on Nov. 19th, 2005 (JST) from 1km in altitude.
The guidance and navigation during the process of
approach was operated normally, and at 4:33am on Nov.
20th, the last approach of vertical descent was
commanded from ground, of which soft-landing was
successfully achieved almost on the designated landing
site of the surface. Deviation from the target point is
now under investigation but presumed within a margin of
30m. The approaching trajectories in the quasi-inertial
coordinate system and Itokawa-fixed coordinate system
are shown in Data-1.
Information on the altitude and its rate during the
descent as measured by Doppler data is shown in Data-2.
The velocity at the time of starting descent was
12cm/sec. At the altitude 54m at 5:28am, wire-cutting of
target marker was commanded, after which, at 5:30am at
altitude 40m, the spacecraft autonomously reduced its
own speed by 9cm/sec to have substantially separated the
target marker. It means that Hayabusa's speed became 3
cm/sec. Separation and freefall of the marker was
confirmed from the image (Data-3)
as well as from descending velocity of the spacecraft at
the time of reducing the speed. The marker is presumed
to have landed on southwest (upper right on the image)
of MUSES Sea.
Hayabusa then switched its range
measurement from Laser Altimeter (LIDAR) to Laser Range
Finder (LRF) at the altitude 35m and moved to hovering
by reducing descending speed to zero at 25m above the
surface, below where Hayabusa, at 5:40am at altitude
17m, let itself to freefall, functioning itself to the
attitude control mode adjustable to the shapes of the
asteroid surface. At this point, the spacecraft
autonomously stopped telemetry transmission to the earth
(as scheduled) to have changed to transmission with
beacon mode more efficient for Doppler measurement by
switching to low gain antenna (LGA) coverable larger
area.
Since then, checking of the onboard
instruments was not possible on a real time basis (as
scheduled), but as a result of analyzing the data
recorded onboard and sent back to the earth in the past
two days, Hayabusa seemed to have autonomously judged to
abort descending and attempted emergency ascent because
its Fan Beam sensors for obstacle checking detected some
kind of catch-light. Allowable margin is set for
Hayabusa for its attitude control, in the case the
spacecraft takes off the ground by accelerating the
velocity on its own. Under such circumstances, the then
spacecraft's attitude was out of the margin, because of
which continuing of safe descent was consequently
chosen. As a result, Hayabusa did not activate its Touch
Down Sensor function.
At the timepoint of Nov.
21, Hayabusa was judged not to have landed on the
surface. According to the replayed data, however, it was
confirmed that Hayabusa stayed on Itokawa by keeping
contact with the surface for about 30 minutes after
having softly bounced twice before settling. This can be
verified by the data history of LRF and also by attitude
control record (Data-4).
This
phenomenon took place during switching interval from
Deep Space Network (DSN) of NASA to Usuda Deep Space
Center, because of which the incident was not detected
by ground Doppler measurement. The descending speed at
the time of bouncing twice was 10cm/sec. respectively.
Serious damage to the spacecraft has not been found yet
except heating sensor that may need checking in some
part of its instrument.
Hayabusa kept steady
contacting with the surface until signaled from ground
to make emergency takeoff at 6:58am (JST). The Touch
Down Sensor supposed to function for sampling did not
work because of the reason above stated, for which
reason firing of projector was not implemented in spite
of the fact that the spacecraft actually made landing.
The attitude at landing is so presumed that the both
bottom ends of +X axis of sampler horn and either the
spacecraft or tip end of the solar panels was in contact
with the surface. Hayabusa became the world-first
spacecraft that took off from the asteroid. Really
speaking, it is the world-first departure from an
celestial body except the moon.
After departure
from the asteroid by ground command, Hayabusa moved into
safe mode due to the unsteady communication line and the
conflict with onboard controlling and computing
priority. The comeback from safety mode to normal 3-axis
control mode needed full two days of Nov. 21 and 22.
Owing to this reason, replaying of the data recorded on
20th is still midway, which means the possibility to
reveal much more new information through further
analysis of the data. As of now, the detailed image of
the landing site to know its exact location has not been
processed yet. Hayabusa is now on the way to fly over to
the position to enable landing and sampling sequence
again. It's not certain yet if or not descent operation
will be able to carry out from the night of Nov. 25
(JST). We will announce our schedule in the evening of
Nov. 24.
Descending and landing operation will
all depend upon availability of DSN of NASA. We would
like to express our sincere gratitude for cooperation of
NASA for tracking networks including backup stations.
(Data-1) Approach to
Itokawa and descending trajectory
Figures below
indicate approaching trajectory of Hayabusa at
descending and landing on Nov. 20th. Fig. 1a describes
the trajectory in quasi-inertial coordinate system with
z-axis (bottom of fig.) directed toward the earth. Fig.
1b describes the trajectory as against the Itokawa-fixed
coordinate system. The trajectory plan was altered
according to the occasion during its operation but it is
clear from the figure that actual flight route was very
close to the one planned in advance.
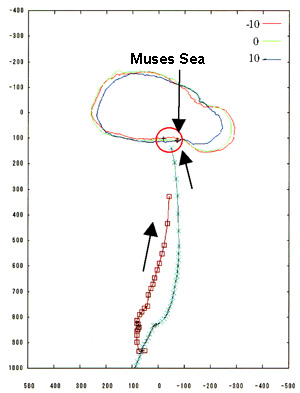
Fig. 1a: Actual descending trajectory as
compared to the scheduled plan.
(Quasi-inertial
coordinate system)
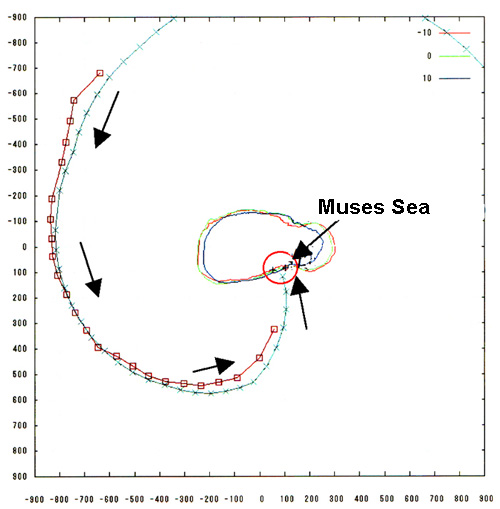
Fig. 1b: Actual descending trajectory as
compared to the scheduled plan.
(Itokawa-fixed
coordinate system)
Fig. 1c is to comply
with fig. 1a to show actual trajectory overlapped on
alternated trajectory plan subject to changes from time
to time according to the occasional situation. Each dot
indicates the location of the spacecraft presumed on
ground from the surface shapes by processing the
compressed image data occasionally. Figures show that
guidance was carried out almost according to the
scheduled trajectory.
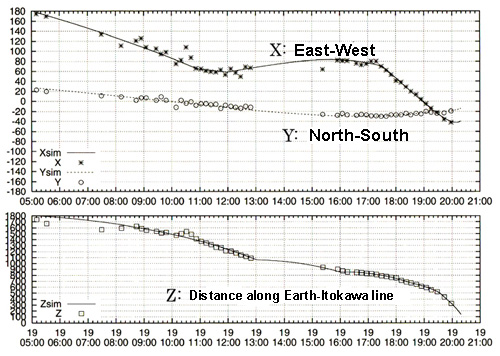
Fig. 1c: Navigation and guidance
(Quasi-inertial system)
From further up in
altitude, the dotted locations presumed from the surface
shapes vary with discrepancy but from below 1km
sufficiently reliable information is obtained. The
figure shows that the spacecraft was precisely guided
according to re-scheduled trajectory plan.
(Data 2): Data
history of descending altitudes to Itokawa and its
descending rate.
Fig. 2a is the Doppler velocity
history measured at Usuda and DSN stations, which
roughly indicates the descending velocity of Hayabusa to
Itokawa. The figure shows that the velocity of Hayabusa
at the start of vertical descent was about 12cm/sec. and
that the spacecraft reduced its speed autonomously
controlling the velocity accelerated by the gravity of
the asteroid.
Fig. 2b shows the updated altitude
information at the right timing that was presumed from
the surface conditions by integrating Doppler velocity
information. The figure indicates the approximate
altitude from the center of the asteroid mass. The
dotted green line in the figure indicates the altitudes
from the surface of ITOKAWA measured by laser altimeter.
We can roughly understand the situation of each event at
the time of happening by referring to both data of laser
altimeter and Doppler velocity information.
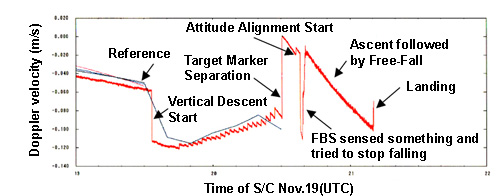
Fig. 2a: Doppler measurement during
descent of Hayabusa
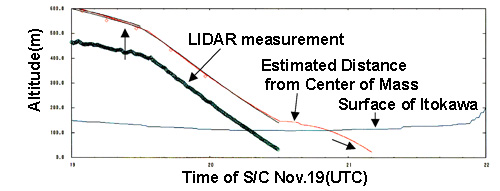
Fig. 2b: Altitude history of Hayabusa
during descent
(or distance history from the center
of the asteroid mass).
The increase in Doppler
velocity at 5:40am (JST) (21:40 world time) is because
of landing on the surface of Itokawa as further
explained below. From then on, tracking was switched to
Usuda station, because of which we could not obtain
Doppler velocity information for a while but the
movement of the spacecraft was partly known from LRF, of
which data has been partly analyzed as to the later
movement of the spacecraft.
(Data 3) Target
marker with 880,000 names separated from Hayabusa and
tracking from aboard.
The target marker was
released from the spacecraft at the relative velocity of
9cm/sec. The delivery location is southwest of (right
under in fig. 3) MUSES Sea. The target marker was
designed to reduce bouncing rate by appropriately
filling up the inside of aluminum sphere with fine
pellets made of high-polymer materials to induce
multiple collisions inside to increase consumption of
energy. The marker was developed through repeated tests
conducted on ground as well as in a non-gravity vacuum
tube to prove its low repulsion.
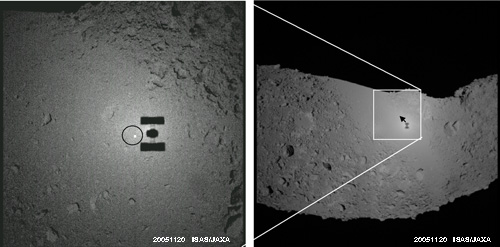
Fig. 3: Target marker with 880,000 names
separated from Hayabusa
(left: imaged at 32m high at
5:33am JST)
(Data 4) Data
history of LRF
Fig. 4a indicates the measured
data of onboard LRF
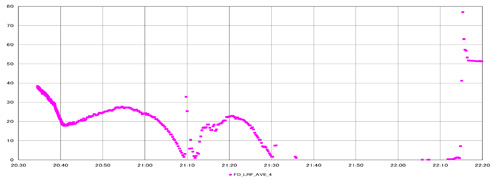
Fig. 4a: Data history of LRF at landing
(unit; m)
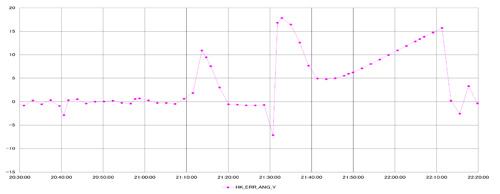
Fig. 4b Discrepancy data history of
attitude control at landing (Y axis only unit
degree)
According to the
distance information data, after self-adjusting movement
toward the surface at altitude 17m, moving slightly
upward was observed, after which Hayabusa kept freefall
by gravity as scheduled to have landed on the surface at
almost zero altitude around 6:10 (JST), which was
followed by the second bouncing to have eventually kept
the altitude almost at zero for time lapse of about 30
minutes.
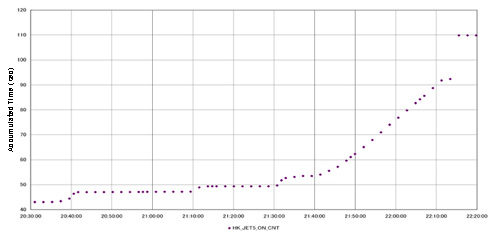
Fig. 4c: Data history of accumulated time
of injecting chemical engine at landing (unit
second)
Figure 4c
indicates data history of accumulated time of chemical
engine thrusting. From the data, we know that (1) at
around 20:40 (WT), 5:40am (JST), (2) around 21:10,
6:10am and (3) around 21:30, 6:30am a big torque force
worked on the spacecraft for which balancing chemical
engine was forced to operate to compensate it. The above
(1) was to comply with topographical alignment but (2)
and (3) were caused by landing as known from data
history of LRF.
From the data information that
chemical engine repeated injection at constant frequency
toward the specific direction for 30 minutes from 21:40
(WT), 6:40am (JST) to 22:10, 7:10am and measured
distance by LRF was small enough and also the attitude
was kept at steady angle, we know for sure that Hayabusa
steadily maintained the attitude from the time of
landing. As chemical engine was programmed to inject
15milli second per a second, when once landed, it could
not overpower the gravity for taking off and changing
attitude but jut kept injecting as long as allowed.
Combined interpretation of fig. 2a and 2b tells
us that Hayabusa was standing on the surface still with
the attitude kept as it landed. From the data
information, its attitude shifting was verified as in
accordance with the rotation of the asteroid, and it is
presumed that the attitude was kept steady as at landing
with the side of ion engine facing approximately
eastward of Itokawa (leftward in the fig. 3a).
[Link]
Today's
HAYABUSA >>
[NOTICE] Web Data Citation
Policy |


{kind=link}